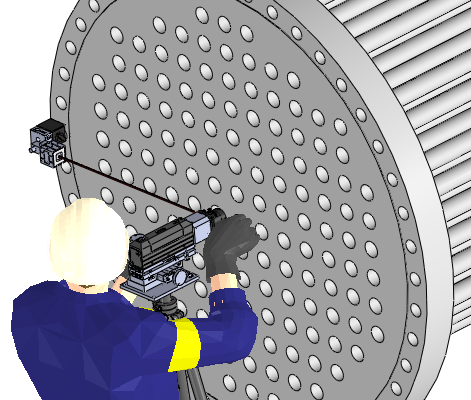
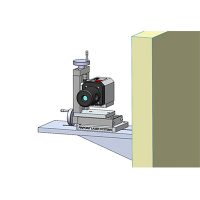
When using a laser alignment system to check a machine or sub-assembly for straightness, flatness, bore alignment and many other geometric parameters, we often need to normalize the laser reference beam to some designated locations on the surface being measured. The laser reference beam is very straight and true but may not be aligned to the surface or mechanical features that you are measuring or checking. For example, imagine a guide rail that you want to check for flatness and at one end of the rail the laser is 2 inches above the rail surface and at the far end of the rail this distance is 2.5 inches. Intuitively, we would like to adjust the laser reference beam until it is a common height above the rail and then make our measurements.
However, the rail surface is not necessarily straight so we need to designate two locations on the rail, called datums, that we can use to establish a straight reference line. We were all taught that “two points in space define a line”. It is at these two designated points, or datums, on the rail that we use to “connect” the straightness of the laser reference beam to the surface that we are trying to measure. This step is frequently referred to as “normalizing” and is in many ways similar to calibrating or connecting the measuring system to the surface to be measured.
We can start by measuring the position or height of the straight laser reference beam relative to the rail surface at two designated locations. At these two locations we have a precise Laser Microgage reading of height and we also know the distance from the laser transmitter to the designated location. Now, we have two options to normalize the position of the laser reference beam to the surface we want to check; bucking in the laser or leaving the laser beam where it is and using math to normalize the readings. Both methods have their advantages and disadvantages.
First, we will consider “bucking in” which is the process of steering the laser so that the laser and the surface are physically parallel to each other at the two designated datum locations. The “bucking in” approach is iterative and involves moving the laser transmitter and/or the surface being measured and re-measuring the values at the two designated locations. This process continues until the readings at the two locations are the same indicating that the laser reference beam and the surface datums are now parallel. The measurement values may not be zero and this is easily achieved with a zero function on Pinpoint’s Laser Microgage display units. The advantage of bucking in the laser and the measured surface is that the receiver can now be moved anywhere and readings that deviate from your zero value indicate high or low regions on the surface being measured. The disadvantage of the bucking in process is that it takes time and sometimes requires finesse to position the laser beam in exactly the correct position and repeat the measuring process. Over the years we have found that many Pinpoint customers have used this process with traditional instruments and prefer to continue with this method.
An alternative to the “bucking in” process is to bring the laser beam generally close to parallel with your two designated datum locations and then use math to calculate the position of the laser beam above the surface that is being measured. Based upon the two selected datum locations on your measured surface, the math involves calculating a rise over run value, commonly referred to as slope, which can then be applied to all the other measurements taken. Based on this information you can now calculate exactly what Microgage reading you should be seeing for each given location on the surface if the surface were exactly straight. The difference between this calculated value and the measured value that you obtain from the Laser Microgage tells you the surface error and which direction (up or down) this error is occurring.
For example, consider a laser reference beam that is not exactly parallel with a machine surface but with your Laser Microgage Receiver, you record a height value of 0.005 inch and 0.010 inch at locations that are 20 inches and 40 inches from the end of the surface, respectively. A simple calculation tells you that halfway between 20 and 40 inches the reading should be 0.0075 inch. If your Microgage measurement does not produce this value then the difference tells you the error in the straightness of the surface and also the direction of this error. Measurements can be made in many places along the measured surface and compared with the calculated values to find the difference in the values or delta values for the surface being measured.
The advantages of this mathematical approach is that it reduces the time needed to “buck in” the laser and is very accurate for measuring. The disadvantage is that for each measurement made you also need to record the position or distance of the laser from the receiver for the calculation at that location. At Pinpoint, we have spreadsheet applications and other tools that make this process quick and easy.
Using a computer or laptop and Pinpoint’s interface option and Capture software you can record many readings and run the calculations quickly and accurately. The Microgage can be set to record readings at a set interval and export these readings into a spreadsheet application. If the Microgage receiver is moved at a fixed rate, and the readings are recorded at a set time interval, one can gather hundreds or thousands of readings along a moving slide or surface and see with great detail how straight the travel or surface really is.
We have talked about the Bucking In process and normalizing measurement readings by measuring distance and using mathematical techniques for each reading. Both methods have their advantages and disadvantages and we have worked for years with customers that are comfortable with one method or the other and with great success. We encourage questions and comments on these methods and have full write-ups and spreadsheet applications to help with each.